Lar
>
Produtos > Módulo telêmetro a laser > Designador de destino a laser de 1064nm > 45MJ Designador de destino a laser (LTD) WIHT LRF




 WIHT LRF")
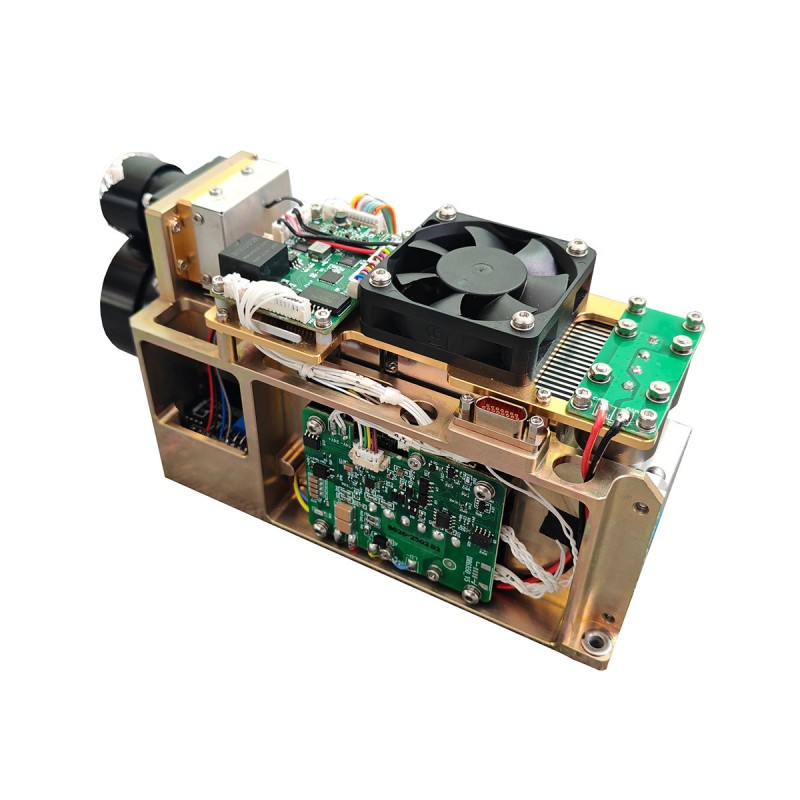
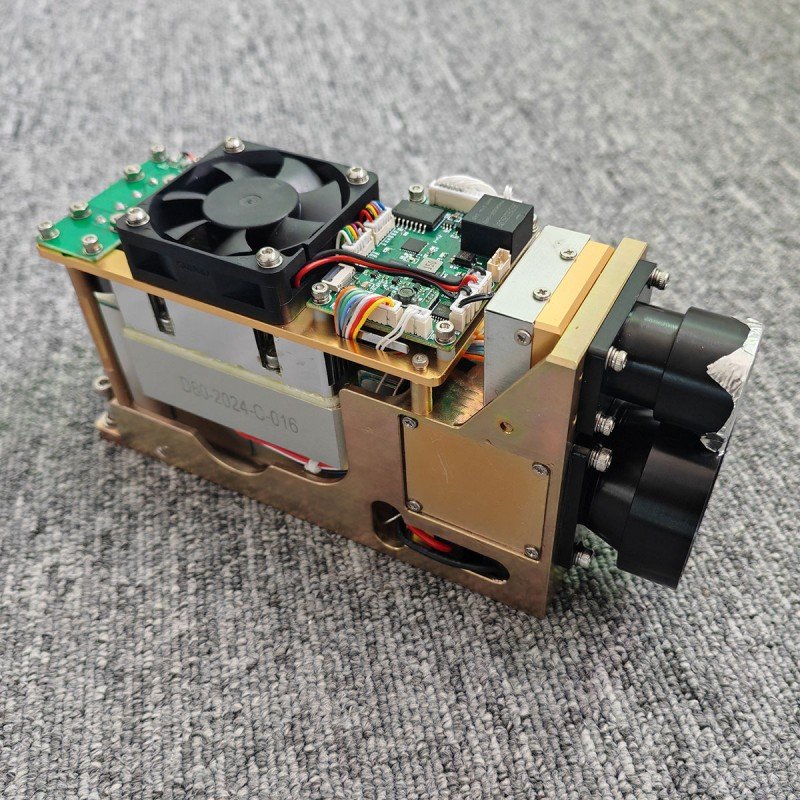
45MJ Designador de destino a laser (LTD) WIHT LRF
O STA-B45M é um designador de destino a laser de 45MJ militar que desempenha um papel crucial nos sistemas de mira de precisão, capaz de fornecer orientações precisas para munição inteligente. Através de um sistema óptico avançado, marca o alvo com um feixe de laser, garantindo que as armas guiadas por precisão possam destruir o alvo com precisão e eficiência extremamente alta.
Enviar consulta
Descrição do produto
Recursos do produto
Leve e miniaturizado
Adaptabilidade ambiental: -40 ℃ ~ 60 ℃ Adaptabilidade de temperatura de largura
Adaptabilidade ambiental: -40 ℃ ~ 60 ℃ Adaptabilidade de temperatura de largura
Parâmetros do indicador do núcleo
Função
a) Ele tem a função de definir o ciclo de irradiação e pode executar a irradiação a laser de acordo com o ciclo definido.
b) Equipado com funções variantes únicas e repetidas a laser.
c) Equipado com função de alcance de vários alvos.
d) Equipado com função de saída de temperatura para os componentes principais da câmera.
e) Equipado com função de proteção de superaquecimento para o dispositivo de medição.
f) Equipado com a função de saída de informações de status do dispositivo de iluminação.
a) Ele tem a função de definir o ciclo de irradiação e pode executar a irradiação a laser de acordo com o ciclo definido.
b) Equipado com funções variantes únicas e repetidas a laser.
c) Equipado com função de alcance de vários alvos.
d) Equipado com função de saída de temperatura para os componentes principais da câmera.
e) Equipado com função de proteção de superaquecimento para o dispositivo de medição.
f) Equipado com a função de saída de informações de status do dispositivo de iluminação.
Parâmetros técnicos
| Modelo | STA-B6445M |
| Comprimento de onda do laser | 1.06um (usando ND: YAG Crystal, Garantia de Seleção de Design) |
| Energia média a laser | ≥ 45mJ (flutuações de energia ≤ ± 8%); |
| ângulo de divergência a laser | 0.5mrad |
| Estabilidade do eixo óptico de emissão a laser | ≤ 0,05mrad |
| Eixo óptico de emissão a laser e a instalação do plano de base não é paralela | ≤ 3 '(garantia de design); |
| Largura do pulso a laser | 10ns ~ 22ns |
| Max variando | Visibilidade ≥ 12km, faixa máxima para medir alvos da OTAN ≥ 6km; |
| Mini variando | 100m |
| Frequência de repetição variante | 1Hz/5Hz/único |
| Precisão da variação | ≤ ± 2m (rms) |
| precisão da variação | ≥ 98% |
| Resolução da distância | ≤ 50m |
| Tempo de trabalho contínuo | 5min (5Hz: trabalho contínuo 5min, descanso ≤ 3min, pode continuar a variar). |
| Distância máxima de irradiação | ≥ 5km |
| Distância mínima de irradiação | ≤ 500m (com a avaliação do sistema) |
| Ciclo de irradiação contínuo | 8, cada ciclo dura 25s, com intervalo 15S; Após 8 ciclos, intervalo de descanso ≤ 20 min; |
| Período de código a laser (definido por protocolo de comunicação) | Faixa de configuração de 40ms ~ 100ms |
| Precisão do tempo de codificação a laser | ≤ ± 2μs |
| Hora de inicialização a laser | ≤3min |
| Função de sincronização extra-código | Sim |
| Temperatura de trabalho: | -40 ~+60 ℃ |
| Temperatura de armazenamento | -50 ~+70 ℃ |
| Peso | ≤580g |
| Módulo para você | 138x75x50mm |
| com capacidade de medição com vários alvos e retorne três valor de vários alvos, com a função de passagem seletiva da distância. Código de frequência e código de intervalo variável podem ser definidos (definido pelo protocolo de comunicação). | |
Preparação para uso
Verifique se a tensão da fonte de alimentação está entre 18V e 32V. Quando a tensão é muito baixa (menor que 18V), o rangefinder não pode se comunicar corretamente ou indicar 'nenhuma saída a laser' e quando a tensão é muito alta (mais de 32V), todo o iluminador pode ser danificado permanentemente. Certifique -se de que a corrente de saída nominal do sistema de fonte de alimentação seja maior que 6a, se for menor que esse valor, pode não haver laser durante a operação. Certifique -se de que a polaridade da fonte de alimentação esteja conectada corretamente, existe um risco de dano ao equipamento se a polaridade for revertida. Consulte o Apêndice A para definições de soquetes de fonte de alimentação.
Precauções para uso
a) O laser emitido por esse rangefinder é um laser de comprimento de onda seguro de 1,06 µm, evite luz direta do laser nos olhos ao usar.
b) Ao ajustar o paralelismo do eixo óptico, certifique -se de bloquear a lente de recebimento; caso contrário, o detector será danificado permanentemente devido ao eco forte.
c) Este módulo de rangefinder é não-fortulado, certifique-se de usar a umidade relativa do ambiente é inferior a 80%e garantir que o uso da limpeza e da higiene ambiental, para não danificar o laser.
d) O alcance do rangefinder está relacionado à visibilidade atmosférica e à natureza do alvo, no caso de neblina, chuva e vento e areia reduzirão a faixa. Alvos como aglomerados de folhas verdes, paredes brancas e calcário exposto têm melhor refletividade e podem aumentar a faixa. Além disso, um aumento na inclinação do alvo no feixe a laser reduzirá a faixa.
e) É estritamente proibido disparar o feixe de laser contra alvos fortemente reflexivos, como paredes de vidro e branco a 100 metros para evitar ecos fortes, o que pode causar danos ao detector de APD.
f) É estritamente proibido desconectar ou conectar o cabo enquanto estiver energizado.
g) Verifique se a polaridade de potência está conectada corretamente, caso contrário, levará a danos permanentes ao dispositivo.
b) Ao ajustar o paralelismo do eixo óptico, certifique -se de bloquear a lente de recebimento; caso contrário, o detector será danificado permanentemente devido ao eco forte.
c) Este módulo de rangefinder é não-fortulado, certifique-se de usar a umidade relativa do ambiente é inferior a 80%e garantir que o uso da limpeza e da higiene ambiental, para não danificar o laser.
d) O alcance do rangefinder está relacionado à visibilidade atmosférica e à natureza do alvo, no caso de neblina, chuva e vento e areia reduzirão a faixa. Alvos como aglomerados de folhas verdes, paredes brancas e calcário exposto têm melhor refletividade e podem aumentar a faixa. Além disso, um aumento na inclinação do alvo no feixe a laser reduzirá a faixa.
e) É estritamente proibido disparar o feixe de laser contra alvos fortemente reflexivos, como paredes de vidro e branco a 100 metros para evitar ecos fortes, o que pode causar danos ao detector de APD.
f) É estritamente proibido desconectar ou conectar o cabo enquanto estiver energizado.
g) Verifique se a polaridade de potência está conectada corretamente, caso contrário, levará a danos permanentes ao dispositivo.
Definição de soquetes de interface
Tabela 1 Definição de interfaces externas
Tabela 1 Definição de interfaces externas
| Número do pedido | Tipo de interface | Pigmento | Definição | Observações |
| 1 | Definição de interface DB9 | Palma | RS422 T+ | Interface de comunicação RS422 |
| 2 | Roxo | Rs422 t- | ||
| 3 | Amarelo | Rs422 r- | ||
| 4 | Verde | RS422 R+ | ||
| 5 | Branco | Gnd | ||
| 6 | Cinzas | Gatilho externo | Nível RS422 | |
| 7 | Azul | Gatilho externo + | ||
| 8 | Definição de interface de poder | Preto | VCC+ | DC 18V ~ 32V |
| 9 | Vermelho | Vcc- |
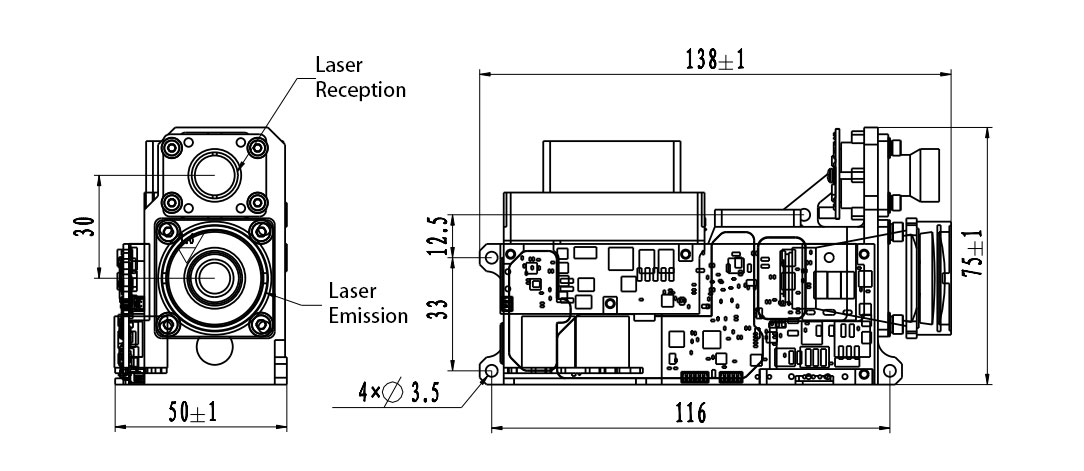
Figura 2 Diagrama de tamanho bidimensional do produto
Protocolo de comunicação de interface
1. Formato de Comunicação:
a) A taxa de transmissão padrão é de 115200bps.
b) Formato de dados: dados de 8 bits, um bit de partida, bit de parada, sem verificação de paridade, dados consistem em byte de cabeçalho, parte do comando, comprimento dos dados, parte do parâmetro e check byte.
2. Modo de comunicação:
a) O mestre e o dispositivo de medição usam o modo de comunicação mestre-escravo, no qual o mestre envia comandos de controle para o dispositivo de medição e o dispositivo de medição recebe e executa as instruções. No estado de variação, o dispositivo de medição envia os dados e o status do dispositivo de medição de volta ao computador superior de acordo com o período de variação, e o formato de comunicação e o conteúdo de comando são mostrados na tabela a seguir.
b) Depois que o mestre envia o comando de controle, o medidor responde continuamente com três comandos de resposta. Se o mestre não receber o comando de resposta do medidor dentro do prazo, ele o reenviará novamente.
O formato da mensagem a ser enviado é o seguinte
a) A taxa de transmissão padrão é de 115200bps.
b) Formato de dados: dados de 8 bits, um bit de partida, bit de parada, sem verificação de paridade, dados consistem em byte de cabeçalho, parte do comando, comprimento dos dados, parte do parâmetro e check byte.
2. Modo de comunicação:
a) O mestre e o dispositivo de medição usam o modo de comunicação mestre-escravo, no qual o mestre envia comandos de controle para o dispositivo de medição e o dispositivo de medição recebe e executa as instruções. No estado de variação, o dispositivo de medição envia os dados e o status do dispositivo de medição de volta ao computador superior de acordo com o período de variação, e o formato de comunicação e o conteúdo de comando são mostrados na tabela a seguir.
b) Depois que o mestre envia o comando de controle, o medidor responde continuamente com três comandos de resposta. Se o mestre não receber o comando de resposta do medidor dentro do prazo, ele o reenviará novamente.
O formato da mensagem a ser enviado é o seguinte
| Stx0 | Cmd | Len | Data1h | Data1L | Chk |
Tabela 2 Descrição do formato da mensagem enviada
| número do pedido | nome | explicar | código | Observações |
| 1 | Stx0 | Sinalizador de início da mensagem | 55 (h) |
|
| 2 | Cmd | Cw | Veja a Tabela 3 |
|
| 3 | Len | Dl | O número de todos os bytes, exceto a marca inicial, palavra de comando e verificação |
|
| 4 | Datah | parâmetro | Veja a Tabela 3 |
|
| 5 | chegada |
|
||
| 6 | Chk | Verificação xor | Exceto pelo byte válido, todos os outros bytes são Xored |
|
O comando é descrito da seguinte forma:
Tabela 3 Descrição dos comandos e palavras de dados enviadas pelo mestre ao medidor
Tabela 3 Descrição dos comandos e palavras de dados enviadas pelo mestre ao medidor
| número do pedido | Cw | função | byte de dados | Observações | comprimento | Código de exemplo |
| 1 | 0x00 | Pare (pare de variação de iluminação) | D1 = 00 (H) D0 = 00 (H) |
|
Seis bytes | 55 00 02 00 00 57 |
| 2 | 0x01 | Variação única | D1 = 00 (H) D0 = 00 (H) | O dispositivo de medição recebe uma única instrução em variação, executa uma operação em variação e carrega o valor da distância variante ao mesmo tempo; | Seis bytes | 55 01 02 00 00 56 |
| 3 | 0x02 | Variação contínua | D1 = xx (h vens d0 = yy (h) | De acordo com o período de variação definida, o valor da distância variante é carregado continuamente. Os dados expressam o período de variação e a unidade é MS | Seis bytes | 55 02 02 03 E8 BE (1Hz variando) |
| 4 | 0x03 | auto-verificação | D1 = 00 (H) D0 = 00 (H) |
|
Seis bytes | 55 03 02 00 00 54 |
| 5 | 0x04 | Configuração da zona cega | D1 = xx (h vens d0 = yy (h) | Os dados descrevem o valor da zona cega, a unidade 1M, e define a tela de distância dentro da zona cega como 0; | Seis bytes | 55 04 02 01 2C 7E (300m é a distância mais próxima) |
| 6 | 0x06 | Número cumulativo de consultas de saída de luz | D1 = 00 (H) D1 = 00 (H) | Desligar o armazenamento; | Seis bytes | 55 06 02 00 00 51 |
| 7 | 0x31 | Defina o código preciso | D4 D3 ~ D0 | D4: Número preciso do código, interno 8 grupos, numerados 1 ~ 8; d3 ~ d0 representa o período de pulso, unidade usRange: 45000 ~ 60000 | Nove bytes | 55 31 05 01 00 00 C3 50 F3 (Número preciso do código: 1cycle: 0000C350 = 50000US) |
| 8 | 0x32 | Definir códigos de intervalo variável | D33 (ref.)D32 (number of coding bits)D31~D30 (time interval between the last bit 0)D29~D28 (time interval between bit 14 and bit 15)D27~D26 (time interval between bit13 bit14)D25~D24 (time interval between bit 12 and bit 13)D23~D22 (time interval between bit11 bit12)D21~D20 (time interval between bit10 bit11) d19 ~ d18 (intervalo de tempo entre bit9 bit10) d17 ~ d16 (intervalo de tempo entre bit8 bit9) d15 ~ d14 (intervalo de tempo entre bit7 bit8) d13 ~ d12 (intervalo de tempo entre bit6 e bit7) d11 ~ d10 (intervalo de tempo bit5 ~ d9 ~ d8 (d8 e bit. bit4) d5 ~ d4 (intervalo de tempo entre bit2 bit3) d3 ~ d2 (intervalo de tempo entre bit1 bit2) d1 ~ d0 (intervalo de tempo entre bit0 e bit1) | D33: Número do código de intervalo variável, 16 grupos internos, o intervalo de números é de 1 ~ 16; D32: Número de bits de codificação, variando de 3 a 16 tempestades de intervalo usrange: 45000 ~ 60000 | 38 bytes |
|
| 9 | 0x33 | Configuração de códigos pseudo-aleatórios | D4 D3 ~ D0 | D4: codificação de código pseudo-aleatom, com 2 grupos embutidos, numerados de 1 a 2; D3: Comprimento do código pseudo-aleatório, variando de 2 a 16d2 D1: Valor inicial do código pseudo-aleatório, que é retirado do bit mais baixo de acordo com o comprimento do codificado pseudo-random0: Standby, set 0 | Nove bytes | 55 33 05 01 10 AA AA 00 72 (Número do Código Pseudo-Random: 1Pseudo Código Random Comprimento: 16 Valor ativado: AAAA) |
| 10 | 0x41 | Defina a consulta para códigos de precisão | D1 D0 | D1: Número preciso do código, o intervalo de números é 1 ~ 8d0: Standby, defina 0 | Seis bytes | 55 41 02 01 00 13Set A consulta para o código de precisão 1 |
| 11 | 0x42 | Defina a consulta para códigos de intervalo variável | D1 D0 | D1: Número do código do intervalo variável, o intervalo de números é 1 ~ 16d0: Standby, defina 0 | Seis bytes | 55 42 02 01 00 14set A consulta para codificação variável 1 |
| 12 | 0x43 | Configure uma consulta para códigos pseudo-aleatórios | D1 D0 | D1: Número do código pseudo-aleatom, o intervalo de números é 1 ~ 2d0: Standby, defina 0 | Seis bytes | 55 43 02 01 00 15set A consulta com codificação pseudo-aleatória 1 |
| 13 | 0x44 | Configuração de tempo de trabalho de irradiação contínua | D1 = 00 (h) d0 = yy (h) | YY O tempo de irradiação contínuo refere -se ao tempo de trabalho contínuo do medidor no modo de irradiação contínuo, unidades s. A parada automática será interrompida após o tempo limite | Seis bytes | 55 44 02 00 3C 2FCONTINUous Working Horário 60s |
| 14 | 0x45 | Consulta de tempo de trabalho de irradiação contínua | D1 = 00 (H) D0 = 00 (H) |
|
Seis bytes | 55 45 02 00 00 12 |
| 15 | 0x30 | Irradiação precisa do código | D3 ~ D0 | D3: Modo de irradiação, 00 irradiação contínua, 01 irradiação periódicaD2: 01 Código preciso irradiaçãod1: Número preciso do código | Oito bytes | 55 30 04 00 01 01 00 61Code 1, iluminação contínua de código preciso |
| Irradiação de código de intervalo variável | D3 ~ D0 | D3: modo de irradiação, 00 irradiação contínua; 01 Irradiação periódicaD2: 02 Código de intervalo variável irradiaçãod1: Número de código de intervalo variável: standby 00 | Oito bytes | 55 30 04 00 02 01 00 62Code 1, Irradiação contínua de código de intervalo variável | ||
| Irradiação síncrona externa | D3 ~ D0 | D3: 00 A sincronização externa é apenas iluminação contínuaD2: 03 Irradiação síncrona externaD1: 00D0: 00 | Oito bytes | 55 30 04 00 03 00 00 62 | ||
| Irradiação de código pseudo-aleatom | D3 ~ D0 | D3: modo de irradiação, 00 irradiação contínua; 01 Irradiação periódica e | Oito bytes | 55 30 04 00 04 01 00 64Code 1, Código Pseudo-aleatom Irradiação contínua | ||
| 16 | 0x24 | Configuração periódica de parâmetros de irradiação | D2 D1 D0 | D2: Número de ciclos de trabalho1: tempo de trabalho por ciclo, unidade SD0: tempo de descanso por ciclo, em s | Sete bytes | 55 24 03 08 14 0A 64 (8 ciclos, 20s de trabalho e 10s descansar por ciclo) |
| 17 | 0x25 | Consulta de parâmetros de irradiação periódica | D1 = 00 (H) D0 = 00 (H) |
|
Seis bytes | 55 25 02 00 00 72 |
| 18 | 0xeb | Consulta do número do equipamento | D1 = 00 (H) D0 = 00 (H) |
|
Seis bytes | 55 EB 02 00 00 aC |
| 19 | 0x51 | Modo de depuração | D1 D0 | D1: 01 Digite o modo de depuração, 00 depuração de saída moded0: standby | Seis bytes | 55 41 02 01 00 17ENTER DEBUG MODE55 41 02 00 00 16exit Debug Mode |
|
|
|
|
|
|
|
|
a) O controle principal recebe formato
O formato da mensagem recebida é a seguinte:
O formato da mensagem recebida é a seguinte:
| Stx0 | Cmd | Len | Dados | Date0 | Chk |
Tabela 4 Descrição do formato das mensagens recebidas
| número do pedido | nome | explicar | código | Observações |
| 1 | Stx0 | Mensagem Iniciar o sinalizador 1 | 55 (h) |
|
| 2 | Cmd_jg | Palavra de comando de dados | Veja a Tabela 5 |
|
| 3 | Len | Dl | O número de todos os bytes, exceto a marca de início, comando word e checksum |
|
| 4 | Dn | parâmetro | Veja a Tabela 5 |
|
| 5 | D0 |
|
||
| 6 | Chk | Verificação xor | Exceto pelo byte válido, todos os outros bytes são Xored |
|
Controle Principal Recebimento de Status Descrição:
A Tabela 5 descreve a palavra de dados enviada pelo medidor para o mestre
A Tabela 5 descreve a palavra de dados enviada pelo medidor para o mestre
| número do pedido | Cw | Função de feedback (correspondente ao comando de controle recebido pelo dispositivo de medição) | byte de dados | Observações | comprimento total |
| 1 | 0x00 | Pare (pare de variação de iluminação) | D1 = 00 (h) d0 = xx ( | Xx: 00 Stop01 normal pare em alta temperatura02 pare quando atrasado | Seis bytes |
| 2 | 0x03 | auto-verificação | D8 ~ D0C5 ~ C0B2 ~ B0 | D8-D7 (INT Tipo): -5V Valor da tensão Feedback, Unidade 0.01V.D6-D5: Feedback do valor da configuração do ponto cego, Unidade 1MD4-D3: Feedback de alta tensão APD, unidade V; D2: Tipo de Carra, Indicando o Feedback do Ambiente de Controle Principal (Unidade de Unidade: Graus Celsius; D1-D0: Centro de Centro de Centro de Centro. do valor da corrente da unidade AC1-C0: temperatura do controle de temperatura UNIDADE DE feedback de temperatura 0.1 ℃ B2: status do controle da temperatura da unidade (8bit) Bit0: 0 Controle de temperatura até a temperatura 1 não RetaDBIT1: 0 Controle de temperatura é normal 1 controle de temperatura é a sobrecorrentegem 2: a corrente de unidade é normal a corrente de unidade e a corrente de unidade e a corrente de unidade e a corrente de acionamento e a corrente de unidade e a corrente de unidade de unidade e a corrente de acionamento e a corrente de unidade e a corrente de unidade e a corrente de acionamento e a corrente de unidade e a corrente de acionamento e a corrente de unidade e a corrente de unidade de unidade e a corrente de unidade de unidade e a corrente de acionamento 4 é a corrente de unidade e a corrente de acionamento 4. Maior que 5AB1: Drive Communication Status (medindo o status de comunicação entre a placa de controle principal e o módulo de acionamento) 0 é normal e 1 é falha0: Defina se a corrente é bem -sucedidaBit1: se a largura do pulso é definida com sucesso 2: SPORTER: STATTURGER INCLUGERSTIMBT: o gatilho é que o gatilho é que o gatilho é que o gatilho é que o gatilho é que o gatilho é que o gatilho é que o gatilho é que o gatilho é que o gatilho é que o gatilho é que o gatilho é que o gatilho é o que o drinfit. Placa de controle principal e o módulo de controle de temperatura) 0 é normal e 1 é falha0: se o início do controle de temperatura é bem -sucedidobit1: se a parada de controle de temperatura é bem -sucedidabit2: se a configuração de temperatura é bem -sucedidabit3: se a consulta de controle de temperatura é bem -sucedidabit4: sparebit5: sparebit6: sparebit7: spare | 22 bytes |
| 3 | 0x04 | Configuração da zona cega, unidade m | D1 D0 | Os dados descrevem o valor da distância mais próximo, a unidade 1M; Iniciar alto e final baixo | Seis bytes (economia de energia de queda) |
| 4 | 0x06 | Número cumulativo de consultas de saída de luz | D3 ~ D0 | Os dados expressam o número de luzes, 4 bytes, com o primeiro byte primeiro | Oito bytes |
| 5 | 0x31 | Defina o código preciso | D4 D3 ~ D0 | D4: Número preciso do código, intervalo 1 ~ 8d3 ~ d0 representa o período, unidade usRange: 45000 ~ 60000 | Nove bytes |
| 6 | 0x32 | Definir códigos de intervalo variável | D1 D0 | D1 Código de intervalo variável intervalo 1 ~ 16d0 00 é definido com sucesso e 01 está definido com falha | Seis bytes |
| 7 | 0x33 | Defina um código pseudo-aleatom | D1 D0 | D1 Número do código pseudo-aleatório intervalo 1 ~ 2d0 00 está definido com sucesso e 01 está definido com falha | Seis bytes |
| 8 | 0x41 | Consulta precisa do ciclo de código | D4 D3 ~ D0 | D4: Número preciso do código, intervalo 1 ~ 8d3 ~ d0 representa o período, unidade usRange: 45000US ~ 60000US | Nove bytes |
| 9 | 0x42 | Consulta de código de intervalo variável | D33 (ref.)D32 (number of coding bits)D31~D30 (time interval between the last bit 0)D29~D28 (time interval between bit14 bit15)D27~D26 (time interval between bit13 bit14)D25~D24 (time interval between bit 12 and bit 13)D23~D22 (time interval between bit 11 and bit 12)D21~D20 (time interval between bit 10 and bit 11)D19~D18 (time interval between bit9 and bit10)D17~D16 (time interval between bit8 bit9)D15~D14 (time interval between bit 7 and bit 8)D13~D12 (time interval between bit6 bit7)D11~D10 (time interval between bit5 bit6)D9~D8 (time interval between bit4 and bit5)D7~D6 (time interval between bit3 bit4) d5 ~ d4 (intervalo de tempo entre bit2 bit3) d3 ~ d2 (intervalo de tempo entre bit1 bit2) d1 ~ d0 (intervalo de tempo entre bit0 bit1) |
|
38 bytes |
| 10 | 0x43 | Consulta de código pseudo-aleatom | D4 D3 ~ D0 | D4: Codificação de código pseudo-aleatom, intervalo 1 ~ 2d3: Comprimento do código pseudo-aleatório, variando de 2 a 16d2 D1: Valor inicial do código pseudo-aleatório, que é retirado da parte inferior de acordo com a duração do codificado de pseudo-random0: o suporte, definido 0 | Nove bytes |
| 11 | 0x44 | Configuração de tempo de trabalho de irradiação contínua | D1 = 00 (h) d0 = yy (h) | AA | Seis bytes |
| 12 | 0x45 | Consulta de tempo de trabalho de exposição contínua | D1 = 00 (h) d0 = yy (h) | AA | Seis bytes |
| 13 | 0x24 | Configuração periódica de parâmetros de irradiação | D2 D1 D0 | D2: Número de ciclos de trabalho1: tempo de trabalho por ciclo, unidade SD0: tempo de descanso por ciclo, em s | Sete bytes |
| 14 | 0x25 | Consulta de parâmetros de irradiação periódica | D2 D1 D0 | D2: Número de ciclos de trabalho1: tempo de trabalho por ciclo, unidade SD0: tempo de descanso por ciclo, em s | Sete bytes |
| 15 | 0xeb | Consulta do número do equipamento | D15 ~ d0 | D15 ~ D12: Modelo do ProdutoD11 D10: Número do Produto 9 D8: Software VersionD7 D6: Ajuste Q Numberd5 D4: Número da unidade3 D2: Número do laser1 D0: FPGA ID | 20 bytes |
| 16 | 0x51 | Modo de depuração | D1 D0 | D1: 01 Digite o modo de depuração, 00 depuração de saída moded0: standby | Seis bytes |
| 17 | 0x01 | Variação única | D9D8 D7 D6D5 D4 D3D2 D1 D0B4 B3 B2 B1 | D9 (bit7-bit0) Byte de bandeira: D9 é a 7ª posição indicando a onda principal; 1: Existe uma onda principal, 0: nenhuma onda principal.d9 é a 6ª posição indicando echo; 1: Existe eco, 0: nenhum ecod9 O quinto bit indica o status do laser; 1: laser normal, 0: falha do laser9 é inválido (definido como 0) na 4ª posição; D9 é inválido na 3ª posição (definido como 0); D9 A segunda posição indica o estado APD; 1: Normal, 0: Errord9 é a primeira posição indicando se existe um alvo anterior; 1: Existe um alvo, 0: nenhum alvo (o alvo antes do alvo principal é o alvo anterior e o alvo na área cega) .d9 O 0º bit indica se existe um alvo subsequente; 1: Existe um alvo, 0: não há alvo (o alvo após o alvo principal é o alvo subsequente) D8-D6 Primeira distância alvo (unidade 0,1M) D5-D3 Distância do segundo alvo (unidade 0,1M) D2-D0 Terceira distância alvo (unidade 0,1M) 3. Os objetivos são de perto para FarB4 e B3 indicam altos valores de pressãob2 indica o valor da corrente da unidadeb1 b0 indica a temperatura do laser | 19 bytes |
| 18 | 0x02 | Variação contínua | D9 D8 D7D5 D4 D3D2 D1 D0B4 B3 B2 B1 B0 | D9 (bit7-bit0) Byte de bandeira: D9 é a 7ª posição indicando a onda principal; 1: Existe uma onda principal, 0: nenhuma onda principal.d9 é a 6ª posição indicando echo; 1: Existe eco, 0: nenhum ecod9 O quinto bit indica o status do laser; 1: laser normal, 0: falha de laser9 é inválido na 4ª posição (definido como 0); d9 é inválido na 3ª posição (definido como 0); d9 A segunda posição indica o estado APD; 1: Normal, 0: Errord9 é a primeira posição a indicar se existe um alvo anterior; 1: Existe um alvo, 0: não há alvo (o alvo antes que o alvo principal seja o alvo anterior e o alvo na área cega) .d9 O 0º bit indica se existe um alvo subsequente; 1: Existe um alvo, 0: Não há alvo (o alvo após o alvo principal é um alvo subsequente) D8-D6 Primeira distância alvo (unidade 0,1M) D5-D3 Distância do segundo alvo (unidade: 0,1M) D2-D0 Terceira distância alvo (unidade 0,1M) 3. Os objetivos são de perto a FarB4 e B3 indicam que o valor de alta pressão APDB2 indica que o valor da corrente da unidadeB1 B0 representa a temperatura do laser | 19 bytes |
| 19 | 0x30 | brilhante | D9 D8 D7D5 D4 D3D2 D1 D0B4 B3 B2 B1 B0 | D9 (bit7-bit0) Byte de bandeira: D9 é o 7º bit para indicar a onda principal; 1: Existe uma onda principal, 0: nenhuma onda principal.d9 é a 6ª posição indicando echo; 1: Existe eco, 0: nenhum ecod9 O quinto bit indica o status do laser; 1: laser normal, 0: falha de laser9 é inválido na posição 4 (definido como 0) d9 é inválido na 3ª posição (definido como 0); d9 A segunda posição indica o status APD; 1: Normal, 0: Errord9 é a primeira posição a indicar se existe um alvo anterior; 1: Existe um alvo, 0: nenhum alvo (o alvo antes do alvo principal é o alvo anterior e o alvo na área cega) .d9 O 0º bit indica se existe um alvo subsequente; 1: Existe um alvo, 0: não há alvo (o alvo após o alvo principal é o alvo subsequente) D8-D6 Primeira distância alvo (unidade 0,1M) D5-D3 Distância do segundo alvo (unidade: 0,1M) D2-D0 Terceira distância alvo (unidade 0,1M) 3. Os objetivos são de perto a FarB4 e B3 indicam que o valor de alta pressão APDB2 indica que o valor da corrente da unidadeB1 B0 representa a temperatura do laser | 19 bytes |
| 20 | 0xec | Um erro de instrução | D1 = 00 d0 = 00 | O comando de feedback da câmera está incorreto | Seis bytes |
| 21 | 0XEE | Erros de eficácia | D1 = 00 d0 = 00 | O feedback da câmera está incorreto | Seis bytes |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Nota: ① Byte/bit indefinido, o padrão é 0; | |||||
Hot Tags: 45MJ Designador de destino a laser (LTD) Wiht LRF, Fabricantes, Fornecedores, Fábrica, China, Made na China, personalizada, de alta qualidade
Categoria Relacionada
Módulo localizador de alcance a laser de 905 nm
Módulo telêmetro laser 1535nm
Módulo telêmetro laser 1570nm
1.54um módulo Rangefinder a laser
Designador de destino a laser de 1064nm
Módulo Anti -Drone Ststem
Módulo Lidar de alcance
Enviar consulta
Por favor, sinta-se livre para dar o seu inquérito no formulário abaixo. Responderemos em 24 horas.




 WIHT LRF")