Lar
>
Produtos > Módulo telêmetro a laser > Módulo Anti -Drone Ststem > 2mrad 1km Rangefinder Module para o STEME anti -drone







2mrad 1km Rangefinder Module para o STEME anti -drone
O módulo Compact STA-WR1000X Laser Rangefinder é altamente adequado para integração nos sistemas de defesa aérea do Exército e da Marinha. O módulo de medição da distância adota o laser de vidro de Erbium mais avançado, que tem alta disponibilidade e baixo custo de manutenção. Seu ângulo de divergência de 2mrad pode medir os UAVs com uma seção transversal de 0,1 ㎡ até 1000 metros, tornando-o um componente importante dos sistemas anti-drones.
Enviar consulta
Descrição do produto
1) variação única e variação contínua;
2) respondendo aos comandos variantes a laser e parando de variando a qualquer momento, de acordo com o comando Stop;
3) Saídas de dados de distância e informações de status uma vez por pulso durante a variação;
4) pode relatar o número cumulativo de pulsos de laser transmitidos (sem perda de energia);
5) seleção de distância, antes e depois da indicação do alvo;
6) Função de autoteste.
2) respondendo aos comandos variantes a laser e parando de variando a qualquer momento, de acordo com o comando Stop;
3) Saídas de dados de distância e informações de status uma vez por pulso durante a variação;
4) pode relatar o número cumulativo de pulsos de laser transmitidos (sem perda de energia);
5) seleção de distância, antes e depois da indicação do alvo;
6) Função de autoteste.
Função de variação a laser;
Função de irradiação a laser;
gatilho do sinal de isolamento fotoelétrico;
Desmontado com mira de feixe;
função de gatilho externo;
Função de irradiação a laser;
gatilho do sinal de isolamento fotoelétrico;
Desmontado com mira de feixe;
função de gatilho externo;
Principais indicadores técnicos
| ÍNDICE ÓPTICO | |
| Comprimento de onda | 1535nm ± 5nm |
| Ângulo de divergência a laser | ≤2mrad |
| Abertura de recebimento eficaz | 25mm |
| Frequência de alcance | Único, 1 ~ 10Hz ajustável |
| Faixa | Visibilidade ≥ 12km, refletividade alvo ≥ 0,3, umidade ≤ 80%, distância de variação de UAV (0,25m × 0,25m) ≥ 2km |
| Precisão da variação | ≤ ± 1m (rms) |
| Medição da precisão | ≥98% |
| Taxa de alarme falso | ≤1% |
| Faixa de medição mínima | ≤30m |
| Estabilidade do eixo a laser | ≤0,05mrad |
| O eixo óptico é paralelo à referência de instalação | ≤0,3mrad |
| Indicadores mecânicos | |
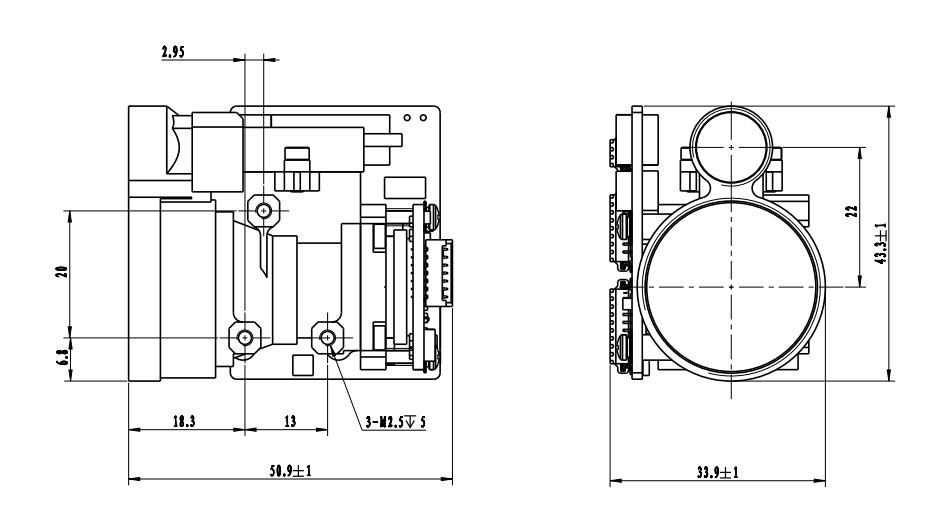
| Tamanho | ≤52mm × 45mm × 35mm |
| Peso | ≤75g |
| Indicadores elétricos | |
| Forneça eletricidade | DC9V ~ 32V |
| Dissipação de energia | Trabalhe menos de 3W a 10Hz, consumo de energia de pico menor que 5w |
| Interface | Interface RS422, 115200bps |
| Interface de energia na controle | Quando a distância segura for atingida, liga -se e use -a; ou no modo de baixa potência para controlar seu estado de trabalho |
| Proteção da placa de circuito | Após a conclusão do projeto e depuração da placa de circuito, é necessário revestir a tinta anti-Shock e fazer o tratamento "três proteção" |
| Adequação ambiental | |
| Temperatura de trabalho | -40 ℃ -65 ℃ |
| Temperatura de armazenamento | -55 ℃ -70 ℃ |
| Vibrar | GJB150.16 A-2009 "Teste de teste de teste ambiental do laboratório de equipamentos militares" Teste de Vibração " |
| Chicote | GJB150.18 A-2009 "Teste de Teste Ambiental de Teste de Equipamento Militar de Equipamento-Teste de Impacto" |
Observação:
1. Descrição do intervalo de estar: o intervalo mudará sob diferentes condições de teste e metas de teste, se você detectar metas especiais, entre em contato com o lado das vendas para confirmar;
2. Faixa minimum: flutuações de 30m-100m, é recomendado a 50m após o uso normal; Devido à energia do laser, é grande, o uso próximo pode queimar o chip do detector; portanto, na depuração, traga uma boa cobertura de espelho para evitar que o chip do detector seja queimado.
2. Faixa minimum: flutuações de 30m-100m, é recomendado a 50m após o uso normal; Devido à energia do laser, é grande, o uso próximo pode queimar o chip do detector; portanto, na depuração, traga uma boa cobertura de espelho para evitar que o chip do detector seja queimado.
Diagrama da estrutura mecânica
Requisitos de interface elétrica
Interface de comunicação: rs422,115200bps, 1 bit inicial, 8 bits de dados, 1 bit de parada, sem paridade;
Tabela 2 Definição de linha de interface
Tabela 2 Definição de linha de interface
| Alfinete | definição | função | Observações |
| 1 | Rx+ | O RS422 recebe positivo |
|
| 2 | Rx- | O RS422 recebe negativo |
|
| 3 | Tx- | O RS422 envia negativo |
|
| 4 | TX+ | O RS422 envia positivo |
|
| 5 | Gnd |
|
|
| 6 | Vee | 9-32V |
|
| 7 | Gnd |
|
|
| 8 | Pwr_en | Obrigue | Controle do sono |
1. Outra informação
1) Módulo de variação STA-WR1000X é usado especialmente para medir a distância do UAV;
2) As especificações podem ser revisadas periodicamente, confirme as especificações de tamanho dos produtos com o vendedor antes de fazer um pedido;
3) O módulo vanging usa um protocolo de comunicação unificado e um computador superior. Se você precisar ligar, entre em contato com o vendedor.
2. Protocolo de comunicação
1) Protocolo de transmissão: comunicação serial assíncrona;
2) taxa de transmissão: 115200;
3) Bits de dados: 10 bits: um bit de partida, 8 bits de dados, 1 parada, verificação inválida;
4) Estrutura de dados: os dados consistem no primeiro byte, na parte de comando, no comprimento dos dados, na parte do parâmetro e no byte de verificação;
5) Modo de comunicação: o mestre envia comandos de controle para a máquina alcance, e a máquina range recebe e executa as instruções. No estado de variação, a máquina variante envia dados e status da máquina variante de volta ao computador superior de acordo com o ciclo variante. O formato de comunicação e o conteúdo do comando são mostrados na tabela a seguir.
a) O controle principal envia
O formato da mensagem a ser enviado é o seguinte:
1) Módulo de variação STA-WR1000X é usado especialmente para medir a distância do UAV;
2) As especificações podem ser revisadas periodicamente, confirme as especificações de tamanho dos produtos com o vendedor antes de fazer um pedido;
3) O módulo vanging usa um protocolo de comunicação unificado e um computador superior. Se você precisar ligar, entre em contato com o vendedor.
2. Protocolo de comunicação
1) Protocolo de transmissão: comunicação serial assíncrona;
2) taxa de transmissão: 115200;
3) Bits de dados: 10 bits: um bit de partida, 8 bits de dados, 1 parada, verificação inválida;
4) Estrutura de dados: os dados consistem no primeiro byte, na parte de comando, no comprimento dos dados, na parte do parâmetro e no byte de verificação;
5) Modo de comunicação: o mestre envia comandos de controle para a máquina alcance, e a máquina range recebe e executa as instruções. No estado de variação, a máquina variante envia dados e status da máquina variante de volta ao computador superior de acordo com o ciclo variante. O formato de comunicação e o conteúdo do comando são mostrados na tabela a seguir.
a) O controle principal envia
O formato da mensagem a ser enviado é o seguinte:
| Stx0 | Cmd | Len | Data1h | Data1L | Chk |
Tabela 2 Descrição do formato da mensagem enviada
| número do pedido | nome | explicar | código | Observações |
| 1 | Stx0 | Sinalizador de início da mensagem | A5 (H) |
|
| 2 | Cmd | Cw | Veja a Tabela 3 |
|
| 3 | Len | Dl | O número de todos os bytes, exceto a marca inicial, palavra de comando e verificação |
|
| 4 | Datah | parâmetro | Veja a Tabela 3 |
|
| 5 | chegada |
|
||
| 6 | Chk | Verificação xor | Exceto pelo byte válido, todos os outros bytes são Xored |
|
O comando é descrito da seguinte forma:
Tabela 3 Descrição dos comandos e palavras de dados enviadas pelo mestre para a máquina rangente
Tabela 3 Descrição dos comandos e palavras de dados enviadas pelo mestre para a máquina rangente
| número do pedido | Cw | função | byte de dados | Observações | comprimento | Código de exemplo |
| 1 | 0x00 | cessar | Datah = 00 (h) datal = 00 (h) | O rangefinder para de medir | Seis bytes | A5 00 02 00 A7 |
| 2 | 0x01 | Variação única | Datah = 00 (h) datal = 00 (h) |
|
Seis bytes | A5 01 02 00 00 A6 |
| 3 | 0x02 | Variação contínua | Datah = xx (h) datal = yy (h) | Dados descrevem o período de variação, em MS | Seis bytes | A5 02 02 03 E8 4E (1Hz variando) |
| 4 | 0x03 | auto-verificação | Datah = 00 (h) datal = 00 (h) |
|
Seis bytes | A5 02 02 00 A4 |
| 5 | 0x04 | Defina a distância mais próxima da seleção | Datah = xx (h) datal = yy (h) | Os dados descrevem o valor da zona cega, unidade 1M | Seis bytes | A5 04 02 00 64 C7 (100m é a distância mais próxima) |
| 6 | 0x06 | Número cumulativo de consultas de saída de luz | Datah = 00 (h) datal = 00 (h) | Número cumulativo de consultas de saída de luz | Seis bytes | A5 06 02 00 A1 |
| 7 | 0x11 | Power AD está ligado | Datah = 00 (h) datal = 00 (h) |
|
Seis bytes | A5 11 02 00 B6 |
| 8 | 0x12 | APD Power está desligada | Datah = 00 (h) datal = 00 (h) |
|
Seis bytes | A5 12 02 00 B5 |
| 9 | 0xeb | Consulta numérica | Datah = 00 (h) datal = 00 (h) | Consulta numérica | Seis bytes | A5 EB 02 00 00 4C |
b) O controle principal recebe formato
O formato da mensagem recebida é a seguinte:
O formato da mensagem recebida é a seguinte:
| Stx0 | Cmd | Len | Dados | Date0 | Chk |
Tabela 4 Descrição do formato das mensagens recebidas
| número do pedido | nome | explicar | código | Observações |
| 1 | Stx0 | Mensagem Iniciar o sinalizador 1 | A5 (H) |
|
| 2 | Cmd_jg | Palavra de comando de dados | Veja a Tabela 5 |
|
| 3 | Len | Dl | O número de todos os bytes, exceto a marca inicial, palavra de comando e verificação |
|
| 4 | Dn | parâmetro | Veja a Tabela 5 |
|
| 5 | D0 |
|
||
| 6 | Chk | Verificação xor | Exceto pelo byte válido, todos os outros bytes são Xored |
|
Controle Principal Recebimento de Status Descrição:
A Tabela 5 descreve a palavra de dados enviada pelo RangeFinder para o controlador mestre
A Tabela 5 descreve a palavra de dados enviada pelo RangeFinder para o controlador mestre
| número do pedido | Cw | função | byte de dados | Observações | comprimento total |
| 1 | 0x00 | cessar | D1 = 00 (H) D0 = 00 (H) |
|
Seis bytes |
| 2 | 0x03 | auto-verificação | D8 ~ D1 | D8-D7: -5V Tensão, unidade 0.01V.D6-D5: Valor do ponto cego, Unidade 1MD4: APD Valor de alta tensão, Unidade V; D3: Tipo de Carro, Indicando Temperatura AD, Unidade: Graus Celsius; D2-D1: +5V, Unidade 0.01V | 12 bytes |
| 3 | 0x04 | Distância da configuração de acesso mais próxima, unidade m | D1 D0 | Os dados descrevem o valor da distância mais próximo, a unidade 1M; Iniciar alto e final baixo | Seis bytes |
| 4 | 0x06 | Número cumulativo de consultas de saída de luz | D3 ~ D0 | Os dados expressam o número de vezes que a luz é emitida, 4 bytes, com o byte alto primeiro | Sete bytes |
| 5 | 0x11 | Power AD está ligado | D1 = 00 (H) D0 = 00 (H) | Power AD está ligado | Seis bytes |
| 6 | 0x12 | APD Power Off | D1 = 00 (H) D0 = 00 (H) | APD Power Off | Seis bytes |
| 7 | 0xed | Trabalhando horas extras | 0x00 0x00 | O laser está sob proteção de trabalho a laser e não pode ser medido. | Seis bytes |
| 8 | 0XEE | Erros de eficácia | 0x00 0x00 |
|
Seis bytes |
| 9 | 0Xef | Tempo limite de comunicação portuária em série | 0x00 0x00 |
|
Seis bytes |
| 10 | 0x01 | Medição de faixa única (alvo único, zero para o segundo e terceiro alvos, zero para o terceiro alvo no início e no final do alvo) | D9D8 D7 D6D5 D4 D3D2 D1 D0 | D8-D6 Distância do primeiro alvo (unidade 0,1M) D5-D3 Distância até o segundo alvo (unidade: 0,1M) D2-D0 Terceira distância alvo (unidade 0,1M) 3. Os objetivos são do byte de bandeira próximo a Fard9 (bit7-bit0): D9 é o 7º bit para indicar a onda principal; 1: Existe uma onda principal, 0: nenhuma onda principal.d9 é a 6ª posição indicando echo; 1: Existe eco, 0: nenhum ecod9 A quinta posição indica o status do laser; 1: Laser normal, 0: falha do laser9 é o quarto bit da bandeira do tempo limite, 1: Normal, 0: Timeoutd9 é inválido na 3ª posição (definida como 1); D9 A segunda posição indica o estado APD; 1: Normal, 0: Errord9 é a primeira posição a indicar se existe um alvo anterior; 1: Existe um alvo anterior, 0: nenhum alvo anterior (alvo na área cega) .d9 O 0º bit indica se existe um alvo subsequente; 1: Existe um alvo subsequente, 0: nenhum alvo subsequente (o alvo após o alvo principal é o alvo subsequente) | 14 bytes |
| 11 | 0x02 | Variação contínua (alvo único, zero para o segundo e terceiro alvos, zero para o terceiro alvo no início e no final do alvo) | D9 D8 D7 D6D5 D4D2 D1 D0 | D8-D6 Distância do primeiro alvo (unidade 0,1M) D5-D3 Distância até o segundo alvo (unidade: 0,1M) D2-D0 Terceira distância alvo (unidade 0,1M) 3. Os objetivos são do byte de bandeira próximo a Fard9 (bit7-bit0): D9 é o 7º bit para indicar a onda principal; 1: Existe uma onda principal, 0: nenhuma onda principal.d9 é a 6ª posição indicando echo; 1: Existe eco, 0: nenhum ecod9 O quinto bit indica o status do laser; 1: Laser normal, 0: falha do laser9 é o quarto bit da bandeira do tempo limite, 1: Normal, 0: Timeoutd9 é inválido na 3ª posição (definida como 1); D9 A segunda posição indica o estado APD; 1: Normal, 0: Errord9 é a primeira posição a indicar se existe um alvo anterior; 1: Existe um alvo anterior, 0: nenhum alvo anterior (alvo na área cega) .d9 O 0º bit indica se existe um alvo subsequente; 1: Existe um alvo subsequente, 0: nenhum alvo subsequente (o alvo após o alvo principal é o alvo subsequente) | 14 bytes |
| 12 | 0xeb | Consulta numérica | D17 …… D0 | D17 D16 D15 D14 D13 D12 MODELO DE MÁQUINA INTEIRA Codificado1d10 Número do produto 9 D6 Software VersionD5 D4 APD Numberd3 D2 Número de laser D1 do FPGA | 22 bytes |
| Nota: ① Byte/bit indefinido, o padrão é 0; | |||||
Hot Tags: 2mrad 1km Rangefinder Módulo para estrondo anti -drones, fabricantes, fornecedores, fábrica, China, fabricados na China, personalizados, de alta qualidade
Categoria Relacionada
Módulo localizador de alcance a laser de 905 nm
Módulo telêmetro laser 1535nm
Módulo telêmetro laser 1570nm
1.54um módulo Rangefinder a laser
Designador de destino a laser de 1064nm
Módulo Anti -Drone Ststem
Módulo Lidar de alcance
Enviar consulta
Por favor, sinta-se livre para dar o seu inquérito no formulário abaixo. Responderemos em 24 horas.