Lar
>
Produtos > Módulo telêmetro a laser > Módulo localizador de alcance a laser de 905 nm > Módulo Micro Telêmetro Laser de 2 km





Módulo Micro Telêmetro Laser de 2 km
O módulo de alcance a laser em miniatura STA-D20X usa um laser semicondutor de 905 nm, que possui as características de longo alcance, baixo consumo de energia, tamanho pequeno e segurança ocular. É muito adequado para integrar pequenos veículos aéreos não tripulados, dispositivos portáteis de visão noturna, imagens térmicas e outros equipamentos.
Enviar consulta
Descrição do produto
Alcance máximo: 2.000 m
Precisão de alcance: ± 1m
Frequência de variação: faixa de disparo único, 1 Hz, 2 Hz
Peso: 10g ± 0,5g
Principais recursos:
Tecnologia de laser semicondutor: Confiabilidade superior, compacidade e menor consumo de energia do que os telêmetros de tempo de voo (TOF) tradicionais, permitindo a integração em dispositivos portáteis e com espaço limitado.
Índice de desempenho do produto
| Interface de dados | Nome do Projeto | STA-D20X |
| 1 | Segurança ocular humana | Sim |
| 2 | Comprimento de onda do laser | 905 nm |
| 3 | Ângulo de divergência do laser | 1×6mrad |
| 4 | Recebendo campo de visão | ~20mrad |
| 5 | Calibre do Transmissor | Φ10×7,5mm |
| 6 | Recebendo calibre | Φ15×10mm |
| 7 | Alcance de alcance | 5 ~ 2.000 m |
| 8 | Precisão de alcance | ±1m |
| 9 | Frequência de medição | Alcance de disparo único, 1 Hz, 2 Hz |
| 10 | Taxa de precisão | ≥98% |
| 11 | Taxa de falsos alarmes | ≤1% |
| 12 | Interface de dados | Precisão de alcance: ± 1m |
| 13 | Tensão de alimentação | CC 3~5V |
| 14 | Consumo de energia | Espera: ≤0,6W@3,3V;Trabalho: ≤1W@3,3V; |
| 15 | ||
| 16 | Pesos | 10±0,5g |
| 17 | Tamanho (C×L×A) | ≤26×25×13,5mm |
| 18 | Temperatura operacional | -20~+60℃ |
| 19 | Temperatura de armazenamento | -30~+60℃ |
| 20 | Choque | 1200g, 1ms |
| 21 | Vibração | 5~50~5Hz, 1 oitava/min, 2,5g |
| 22 | Confiabilidade | MTBF≥1500h |
| 23 | Hora de inicialização | ≤200ms; |
| 24 | Interface elétrica | Soquete: 0,8WTB-6AB-01Plugue: 0,8WTB-6Y-2 |
Composição do Módulo
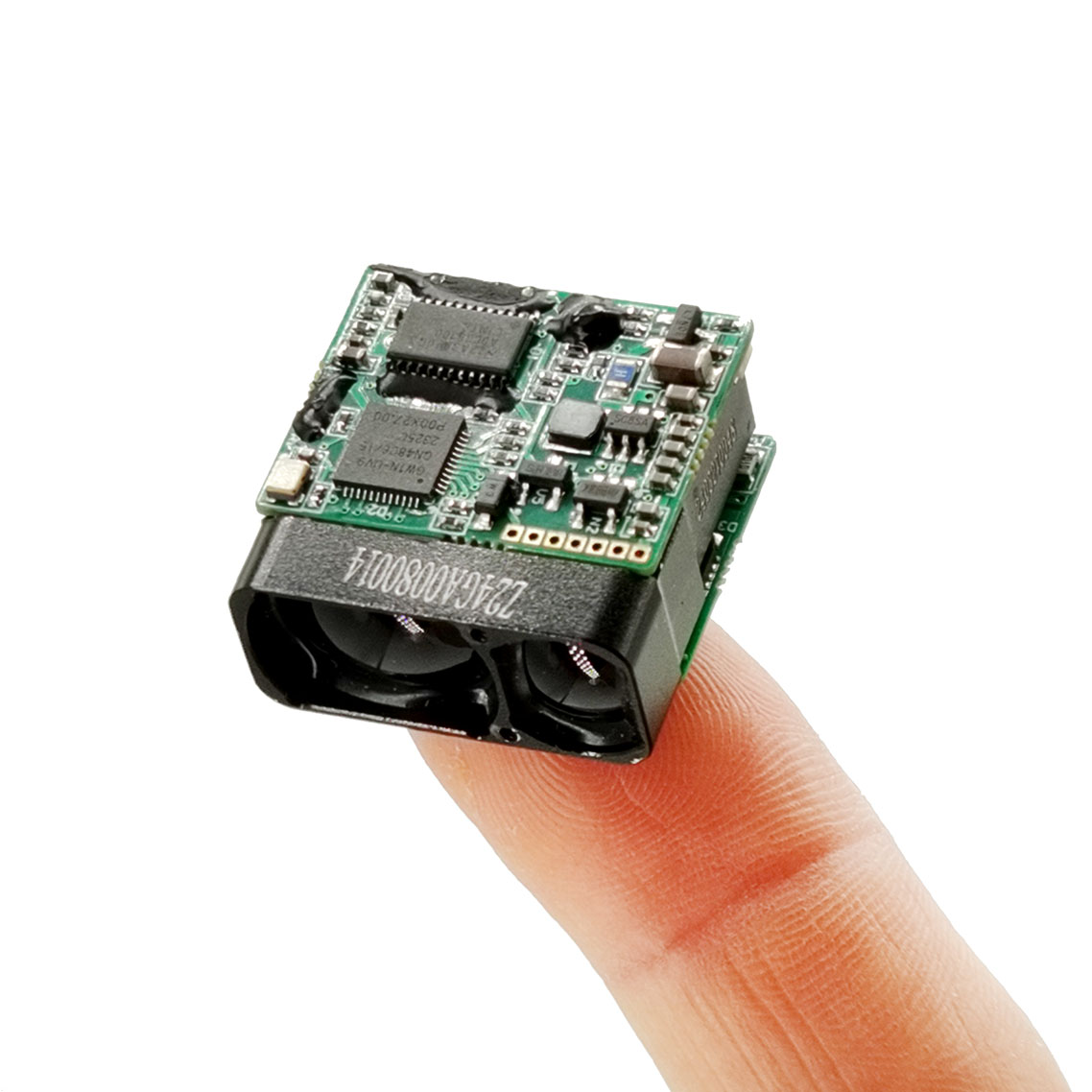
Os principais componentes do produto telêmetro a laser são os seguintes:
a) Receber e transmitir componentes;
b) Componentes do circuito; 26 mm × 25 mm × 13,5 mm (C × L × A), o peso é ≤10g ± 0,5g e sua aparência é mostrada na Fig.1.
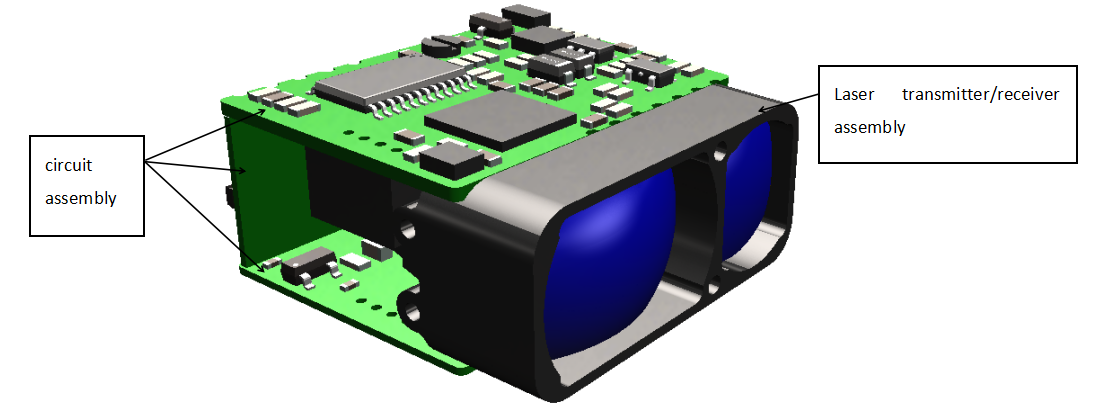
Figura 1 Aparência do Produto
Interface de instalação de estrutura
As dimensões externas das interfaces mecânicas e ópticas são mostradas na Figura 2.
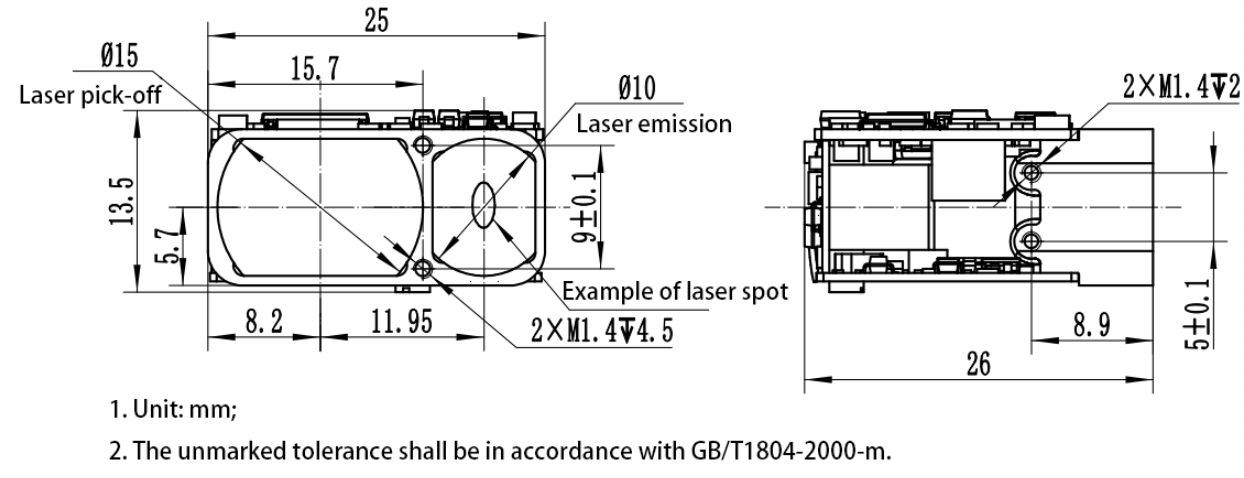
Figura 2 Diagrama de interface mecânica e óptica
Interface elétrica
Os requisitos de interface elétrica são os seguintes:
a) Tensão de alimentação: 3V~5,5V (valor típico 3,3V ou 5V);
b) Consumo de energia em espera: ≤ 0,8W;
c) Consumo médio de energia: ≤ 1W;
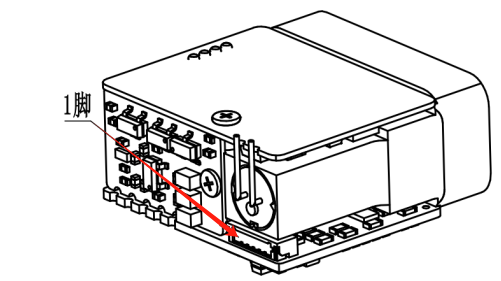
d) A extremidade superior do computador realiza testes de reticulação com o conector 0.8WTB-6AB-01 da extremidade da máquina de medição de distância (Yueqing Huabao) através do conector 0.8WTB-6Y-2. As definições dos pinos da fonte de alimentação e da porta de comunicação na extremidade do telêmetro são mostradas na Tabela 1, e as posições dos pinos do conector são mostradas na Figura 3.
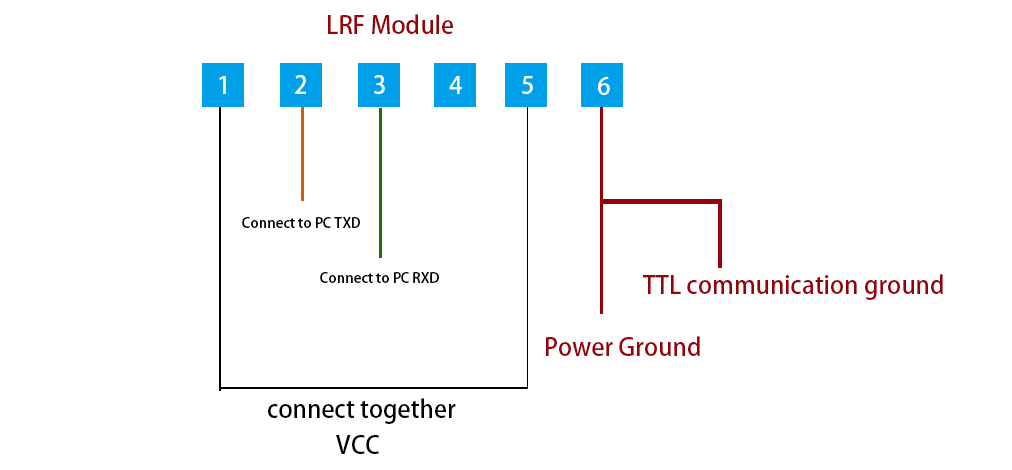
Tabela 2 Definição do Pino Elétrico do Produto
| Alfinete | Rotulagem | Definição de características elétricas | Direção do sinal |
| 1 | Potência-EN | ||
| 2 | TTL_RXD | Porta de entrada de sinal | Computador host para telêmetro |
| 3 | TTL_TXD | Porta de saída de sinal | Telêmetro para computador host |
| 4 | NC | ||
| 5 | Fonte de alimentação + | ||
| 6 | GND |
c) Consumo médio de energia: ≤ 1W;
Comunicação do Módulo
Dados
Taxa de transmissão: 115200bps;
u Formato de transmissão de byte único: incluindo 1 bit de início, 8 bits de dados, sem verificação, 1 bit de parada, dados de 8 bits são transmitidos primeiro em baixo e depois em alto;
Protocolo
Comando de alcance único
Obs: Envie o código de verificação = byte 3 + byte 4 + byte 5 + byte 6 + byte 7;
Código de verificação recebido = byte 1 + byte 2 + byte 3 + byte 4 + byte 5 + byte 6 + byte 7.
Envie para o módulo de alcance
| byte | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| descrição | 0x55 | 0xAA | 0x88 | 0xFF | 0xFF | 0xFF | 0xFF | verificar código |
| byte | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| descrição | 0x55 | 0xAA | 0x88 | status | 0xFF | DADOS_H | DADOS_L | verificar código |
Status=0, falha na medição única; DADOS_H=0xFF, DADOS_L=0xFF; status=1, medição única é bem-sucedida; DATA_H=byte alto do resultado da medição; DATA_L=byte baixo do resultado da medição.
Comando de alcance contínuo
Obs: Envie o código de verificação = byte 3 + byte 4 + byte 5 + byte 6 + byte 7;
Código de verificação recebido = byte 1 + byte 2 + byte 3 + byte 4 + byte 5 + byte 6 + byte 7.
Envie para o módulo de alcance
| byte | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| descrição | 0x55 | 0xAA | Frequência | 0xFF | 0xFF | 0xFF | 0xFF | verificar código |
| byte | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| descrição | 0x55 | 0xAA | Frequência | status | 0xFF | DADOS_H | DADOS_L | verificar código |
Status=0, falha na medição contínua; DADOS_H=0xFF, DADOS_L=0xFF; status=1, medição contínua bem-sucedida; DATA_H=byte alto do resultado da medição; DATA_L=byte inferior do resultado da medição.
Freq=0x89,1Hz para variação; Freq=0xA9,2Hz para variação; Freq=0xB9,5Hz para variação; Freq=0xF9 para modo de calibração do eixo (o status do eixo é enviado de volta uma vez após receber a instrução de calibração do eixo).
Pare de medir
Enviar para módulo de alcance:
| byte | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| descrição | 0x55 | 0xAA | 0x8E | 0xFF | 0xFF | 0xFF | 0xFF | verificar código |
O módulo de alcance retorna:
| byte | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| descrição | 0x55 | 0xAA | 0x8E | status | 0xFF | 0xFF | 0xFF | verificar código |
Status = 0, a medição contínua não foi fechada; status = 1, a medição contínua foi fechada com sucesso.
Nota: Os dados são retornados em hexadecimal e todos os resultados dos dados serão produzidos multiplicando os dados reais por 10;
Exemplo: dist=2000,3m, os dados de saída são 20003, que são convertidos em hexadecimal como 4E23, ou seja, Dados1=0x4E e Dados2=0x23.
Hot Tags: Módulo telêmetro micro laser de 2 km, fabricantes, fornecedores, fábrica, China, feito na China, personalizado, de alta qualidade
Categoria Relacionada
Módulo localizador de alcance a laser de 905 nm
Módulo telêmetro laser 1535nm
Módulo telêmetro laser 1570nm
1.54um módulo Rangefinder a laser
Designador de destino a laser de 1064nm
Módulo Anti -Drone Ststem
Módulo Lidar de alcance
Enviar consulta
Por favor, sinta-se livre para dar o seu inquérito no formulário abaixo. Responderemos em 24 horas.





")