Lar
>
Produtos > Módulo telêmetro a laser > Módulo telêmetro laser 1535nm > Módulo Rangefinder de Rangefinder de 4 km para os olhos (LRF)




")




Módulo Rangefinder de Rangefinder de 4 km para os olhos (LRF)
O STA-B40X é um módulo de medição de distância a laser para os olhos humanos, que pode detectar a distância alvo e transmitir a distância medida para o computador superior através da comunicação serial. Visibilidade ≥ 12km, refletividade alvo ≥ 0,3, umidade ≤ 80%, o veículo (alvo 2,3m × 2,3m) de variação ≥ 4km.
Enviar consulta
Descrição do produto
Funções principais
(1) variação única e variação contínua;
(2) responder a comandos de variação a laser e pode parar de variando a qualquer momento de acordo com o comando stop;
(3) dados de distância de saída e informações de status uma vez por pulso durante a medição da distância;
(4) pode relatar o número cumulativo de pulsos de laser transmitidos (sem perda de energia);
(5) seleção de distância, indicação de alvo dianteiro e traseiro;
(6) Função de autoteste.
(2) responder a comandos de variação a laser e pode parar de variando a qualquer momento de acordo com o comando stop;
(3) dados de distância de saída e informações de status uma vez por pulso durante a medição da distância;
(4) pode relatar o número cumulativo de pulsos de laser transmitidos (sem perda de energia);
(5) seleção de distância, indicação de alvo dianteiro e traseiro;
(6) Função de autoteste.
Índice de desempenho do produto
| Item | Parâmetro técnico | Instrução |
| Modelo | STA-B40X | |
| Comprimento de onda de trabalho | 1535 ± 5nm | |
| Segurança ocular | Classe 1 (IEC 60825-1) | |
| Recebendo abertura | Φ16mm | |
| Abertura de emissão | Φ13mm | |
| Capacidade de variação | 30-8000m | |
| Faixa de variação | ≥8000m | Max, refletividade: 0,9, visibilidade do observador 25km |
| ≥6000m | Grandes alvos de construção, refletividade: 0,6, visibilidade do observador 20 km | |
| ≥4000m | Alvo da OTAN | |
| ≥2000m | Alvo humano | |
| ≥1200m | Alvo de UAV | |
| Mini Range | 30m |
|
| Detecção multi-alvo | Até 3 alvo |
|
| Resolução da faixa | 20m |
|
| Precisão da variação | ± 1m | 3d |
| Frequência de variação | 1 ~ 10Hz ajustável |
|
| Taxa de precisão | ≥98% |
|
| Taxa de alarme falso | 1% |
|
| Ângulo de divergência | ≤0,6mrad |
|
| Interface de comunicação | Ttl | A interface rs422/rs232 pode ser personalizada |
| Tensão | DC4.5 ~ 16V |
|
| Consumo de energia | ≤1.2w (@1Hz) | Poder de trabalho |
| ≤5w@12V | Potência de pico | |
| Estabilidade do eixo óptico a laser | ≤0,05mrad |
|
| Erro paralelo | ≤0,3mrad | Erro de paralelismo do eixo óptico para a referência de montagem |
| Choque mecânico | 75g, 1ms |
|
| Temperatura de trabalho | -40 ℃~+70 ℃ |
|
| Temperatura de armazenamento | -55 ℃~+75 ℃ |
|
| Confiabilidade | MTBF ≥ 1500H |
|
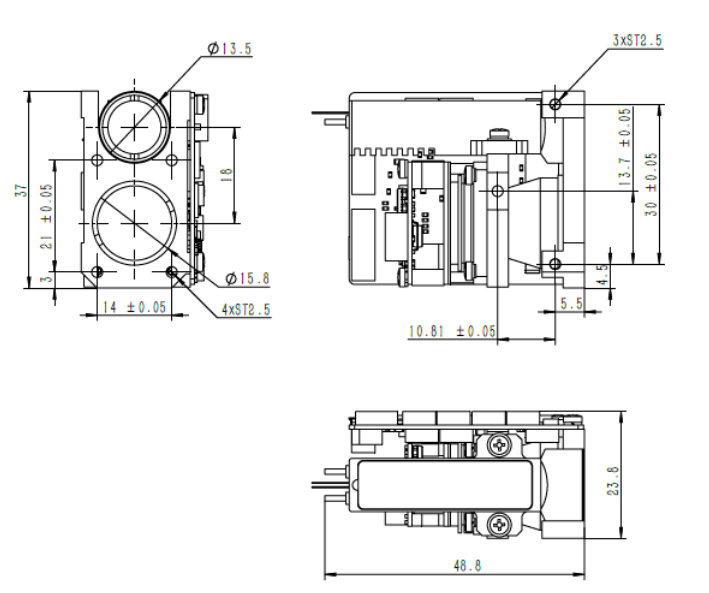
| Tamanho | ≤19x24x37mm |
|
| Peso | ≤50g |
|
| Função principal | Primeiro e último alvo variando, variação multi-alvo, seletividade à distância | |
Notas:
1) Tamanho alvo da OTAN 2,3 m × 2,3 m; Tamanho do alvo humano 0,5 m × 1,7 m; Tamanho alvo de UAV 0,2 m × 0,3 m; Refletividade 30%, umidade ≤80%, visibilidade do observador a 12 km
Interface de instalação da estrutura
Requisitos de interface elétrica
Interface de comunicação: UART (TTL_3.3 V), 115200 bps, 1 bit de partida, 8 bits de dados, 1 parada não, sem paridade;
Tabela 1 Definição central
Tabela 1 Definição central
| Alfinete | Definição | Cor de linha | Notas |
| 1 | Fonte de alimentação + | Vermelho | 4.5-16V |
| 2 | Fonte de energia - | Preto | Gnd |
| 3 | Power_on | Branco | Power on Control TTL_3.3V Nível, módulo ON (> 2,7V), módulo OFF (<0,3V) |
| 4 | Uart_tx | Amarelo | Remetente de porta em série |
| 5 | Uart_rx | Verde | Receptor de porta serial |
| 6 | Gnd | Preto | Ground de porta em série |
Módulos de variação OEM/ODM e soluções personalizadas
O B40X foi projetado para integradores de sistemas que procuram uma solução de variação de laser conveniente, poderosa e compacta. Ele fornece desempenho confiável em uma ampla gama de aplicações.
É muito pequeno, ultraleve, possui baixo consumo de energia e pode ser medido a uma longa distância. É adequado para dispositivos portáteis (imagens térmicas), aplicações de montagem de armas, sistemas portáteis e suítes de sensores leves e veículos aéreos ou UGVs não tripulados.
É muito pequeno, ultraleve, possui baixo consumo de energia e pode ser medido a uma longa distância. É adequado para dispositivos portáteis (imagens térmicas), aplicações de montagem de armas, sistemas portáteis e suítes de sensores leves e veículos aéreos ou UGVs não tripulados.
Protocolo de comunicação
1. Protocolo de transmissão: comunicação serial assíncrona;
2. Taxa de porta: 115200;
3. Bits de dados: 10bits: um bit de partida, 8 bits de dados, bit uma parada, verificação inválida;
4. Estrutura de dados: os dados consistem no byte de cabeçalho, parte de comando, comprimento dos dados, parte do parâmetro e check byte;
5. Modo de comunicação: o controle mestre envia comandos de controle para a máquina de alcance, e a máquina de alcance recebe e executa as instruções. No estado de variação, a máquina variante envia dados e status da máquina variante de volta ao computador superior de acordo com o ciclo variante. O formato de comunicação e o conteúdo do comando são mostrados na tabela a seguir.
A) Controle principal envia
O formato da mensagem a ser enviado é o seguinte:
2. Taxa de porta: 115200;
3. Bits de dados: 10bits: um bit de partida, 8 bits de dados, bit uma parada, verificação inválida;
4. Estrutura de dados: os dados consistem no byte de cabeçalho, parte de comando, comprimento dos dados, parte do parâmetro e check byte;
5. Modo de comunicação: o controle mestre envia comandos de controle para a máquina de alcance, e a máquina de alcance recebe e executa as instruções. No estado de variação, a máquina variante envia dados e status da máquina variante de volta ao computador superior de acordo com o ciclo variante. O formato de comunicação e o conteúdo do comando são mostrados na tabela a seguir.
A) Controle principal envia
O formato da mensagem a ser enviado é o seguinte:
| Stx0 | Cmd | Len | Data1h | Data1L | Chk |
| número do pedido | nome | explicar | código | Observações |
| 1 | Stx0 | Sinalizador de início da mensagem | A5 (H) |
|
| 2 | Cmd | Cw | Veja a Tabela 3 |
|
| 3 | Len | Dl | O número de todos os bytes, exceto a marca inicial, palavra de comando e verificação |
|
| 4 | Datah | parâmetro | Veja a Tabela 3 |
|
| 5 | chegada |
|
||
| 6 | Chk | Verificação xor | Exceto pelo byte válido, todos os outros bytes são Xored |
|
O comando é descrito da seguinte forma:
Tabela 3 Descrição dos comandos e palavras de dados enviadas pelo mestre para a máquina rangente
Tabela 3 Descrição dos comandos e palavras de dados enviadas pelo mestre para a máquina rangente
| número do pedido | Cw | função | byte de dados | Observações | comprimento | Código de exemplo |
| 1 | 0x00 | cessar | Datah = 00 (h) datal = 00 (h) | O rangefinder para de medir | Seis bytes | A5 00 02 00 A7 |
| 2 | 0x01 | Variação única | Datah = 00 (h) datal = 00 (h) |
|
Seis bytes | A5 01 02 00 00 A6 |
| 3 | 0x02 | Variação contínua | Datah = xx (h) datal = yy (h) | Dados descrevem o período de variação, em MS | Seis bytes | A5 02 02 03 E8 4E (1Hz variando) |
| 4 | 0x03 | auto-verificação | Datah = 00 (h) datal = 00 (h) |
|
Seis bytes | A5 02 02 00 A4 |
| 5 | 0x04 | Defina a distância mais próxima da seleção | Datah = xx (h) datal = yy (h) | Os dados descrevem o valor da zona cega, unidade 1M | Seis bytes | A5 04 02 00 64 C7 (100m é a distância mais próxima) |
| 6 | 0x06 | Número cumulativo de consultas de saída de luz | Datah = 00 (h) datal = 00 (h) | Número cumulativo de consultas de saída de luz | Seis bytes | A5 06 02 00 A1 |
| 7 | 0x11 | Power AD está ligado | Datah = 00 (h) datal = 00 (h) |
|
Seis bytes | A5 11 02 00 B6 |
| 8 | 0x12 | APD Power está desligada | Datah = 00 (h) datal = 00 (h) |
|
Seis bytes | A5 12 02 00 B5 |
| 9 | 0xeb | Consulta numérica | Datah = 00 (h) datal = 00 (h) | Consulta numérica | Seis bytes | A5 EB 02 00 00 4C |
a) O controle principal recebe formato
O formato da mensagem recebida é a seguinte:
O formato da mensagem recebida é a seguinte:
| Stx0 | Cmd | Len | Dados | Date0 | Chk |
Tabela 4 Descrição do formato das mensagens recebidas
| número do pedido | nome | explicar | código | Observações |
| 1 | Stx0 | Mensagem Iniciar o sinalizador 1 | A5 (H) |
|
| 2 | Cmd_jg | Palavra de comando de dados | Veja a Tabela 5 |
|
| 3 | Len | Dl | O número de todos os bytes, exceto a marca inicial, palavra de comando e verificação |
|
| 4 | Dn | parâmetro | Veja a Tabela 5 |
|
| 5 | D0 |
|
||
| 6 | Chk | Verificação xor | Exceto pelo byte válido, todos os outros bytes são Xored |
|
Controle Principal Recebimento de Status Descrição:
A Tabela 5 descreve a palavra de dados enviada pelo RangeFinder para o controlador mestre
A Tabela 5 descreve a palavra de dados enviada pelo RangeFinder para o controlador mestre
| número do pedido | Cw | função | byte de dados | Observações | comprimento total |
| 1 | 0x00 | cessar | D1 = 00 (H) D0 = 00 (H) |
|
Seis bytes |
| 2 | 0x03 | auto-verificação | D8 ~ D1 | D8-D7: -5V Tensão, unidade 0.01V.D6-D5: Valor do ponto cego, Unidade 1MD4: APD Valor de alta tensão, Unidade V; D3: Tipo de Carro, Indicando Temperatura AD, Unidade: Graus Celsius; D2-D1: +5V, Unidade 0.01V | 12 bytes |
| 3 | 0x04 | Distância da configuração de acesso mais próxima, unidade m | D1 D0 | Os dados descrevem o valor da distância mais próximo, a unidade 1M; Iniciar alto e final baixo | Seis bytes |
| 4 | 0x06 | Número cumulativo de consultas de saída de luz | D3 ~ D0 | Os dados expressam o número de luzes, 4 bytes, com o primeiro byte primeiro | Sete bytes |
| 5 | 0x11 | Power AD está ligado | D1 = 00 (H) D0 = 00 (H) | Power AD está ligado | Seis bytes |
| 6 | 0x12 | APD Power Off | D1 = 00 (H) D0 = 00 (H) | APD Power está desligada | Seis bytes |
| 7 | 0xed | Trabalhando horas extras | 0x00 0x00 | O laser está sob proteção de trabalho a laser e não pode ser medido. | Seis bytes |
| 8 | 0XEE | Erros de eficácia | 0x00 0x00 |
|
Seis bytes |
| 9 | 0Xef | Tempo limite de comunicação portuária em série | 0x00 0x00 |
|
Seis bytes |
| 10 | 0x01 | Medição de faixa única (alvo único, zero para o segundo e terceiro alvos, zero para o terceiro alvo no início e no final do alvo) | D9D8 D7 D6D5 D4 D3D2 D1 D0 | D8-D6 Distância do primeiro alvo (unidade 0,1M) D5-D3 Distância até o segundo alvo (unidade: 0,1M) D2-D0 Terceira distância alvo (unidade 0,1M) 3. Os objetivos são de Byte de bandeira perto de Fard9 (Bit7-bit0): D9 é a 7ª posição indicando a onda principal; 1: Existe uma onda principal, 0: nenhuma onda principal.d9 é a 6ª posição indicando echo; 1: Existe eco, 0: nenhum ecod9 A quinta posição indica o status do laser; 1: Laser normal, 0: falha de laser9 é o quarto bit da bandeira do tempo limite, 1: Normal, 0: Timeoutd9 é inválido na 3ª posição (definida como 1); D9 A segunda posição indica o status do APD; 1: Normal, 0: Errord9 é a primeira posição a indicar se existe um alvo anterior; 1: Existe um alvo anterior, 0: nenhum alvo anterior (alvo na área cega) .d9 O 0º bit indica se existe um alvo subsequente; 1: Existe um alvo subsequente, 0: nenhum alvo subsequente (o alvo após o alvo principal é o alvo subsequente) | 14 bytes |
| 11 | 0x02 | Variação contínua (alvo único, zero para o segundo e terceiro alvos, zero para o terceiro alvo no início e no final do alvo) | D9 D8 D7 D6D5 D4D2 D1 D0 | D8-D6 Distância do primeiro alvo (unidade 0,1M) D5-D3 Distância até o segundo alvo (unidade: 0,1M) D2-D0 Terceira distância alvo (unidade 0,1M) 3. Os objetivos são do byte de bandeira próximo a Fard9 (bit7-bit0): D9 é o 7º bit para indicar a onda principal; 1: Existe uma onda principal, 0: nenhuma onda principal.d9 é a 6ª posição indicando echo; 1: Existe eco, 0: nenhum ecod9 A quinta posição indica o status do laser; 1: Laser normal, 0: falha do laser9 é o quarto bit da bandeira do tempo limite, 1: Normal, 0: Timeoutd9 é inválido na 3ª posição (definida como 1); D9 A segunda posição indica o estado APD; 1: Normal, 0: Errord9 é a primeira posição a indicar se existe um alvo anterior; 1: Existe um alvo anterior, 0: nenhum alvo anterior (alvo na área cega) .d9 O 0º bit indica se existe um alvo subsequente; 1: Existe um alvo subsequente, 0: nenhum alvo subsequente (o alvo após o alvo principal é o alvo subsequente) | 14 bytes |
| 12 | 0xeb | Consulta numérica | D17 …… D0 | D17 D16 D15 D14 D13 D12 MODELO DE MÁQUINA INTEIRA Codificado1d10 Número do produto | 22 bytes |
| Nota: ① Byte/bit indefinido, o padrão é 0; | |||||
Hot Tags: Módulo Rangefinder de Rangefinder (LRF), fabricante, fornecedores, fábrica, China, fabricados na China, personalizados, personalizados
Categoria Relacionada
Módulo localizador de alcance a laser de 905 nm
Módulo telêmetro laser 1535nm
Módulo telêmetro laser 1570nm
1.54um módulo Rangefinder a laser
Designador de destino a laser de 1064nm
Módulo Anti -Drone Ststem
Módulo Lidar de alcance
Enviar consulta
Por favor, sinta-se livre para dar o seu inquérito no formulário abaixo. Responderemos em 24 horas.